| The Public Paperfolding History Project
Last updated 19/2/2024 x |
|||||||
| The Flexatube | |||||||
| This
page is being ujsed to collect information about the
history of the paperfolding puzzle known as the
Flexatube. Please contact me if you know any of this
information is incorrect or if you have any other
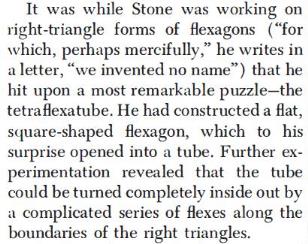
information that should be added. Thank you. ********** c1939 Possible date of invention of the Flexatube puzzle by Arthur Stone according to the account in Martin Gardner's 'Mathematical Games' column in the May 1958 issue of 'Scientific American' (see 1958 entry for discussion of the reliability of this attribution). ********** 1955 'The Mathematics Gazette' Vol 39 issue 330 of December 1955 contains a note titled 'A Deformation Puzzle' that describes the Flexatube.
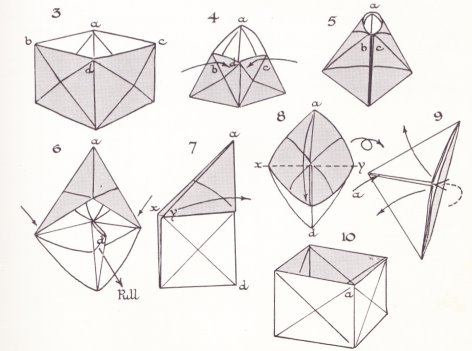
********** 1956 Martin Gardner published the 'Flex-Tube Puzzle' in 'Ibidem 7' (issue 7 of a somewhat obscure Canadian magic magazine) of 13th September 1956. According to the notes in 'The Second Scientific American Book of Mathematical Puzzles and Diversions' (see 1960 below) a sample of the puzzle was attached to the page. ********** 1957 'Ibidem' issue 9 of 12th March 1957 contained a solution to the Flex-Tube Puzzle by T S Ransom. According to the notes in 'The Second Scientific American Book of Mathematical Puzzles and Diversions' (see 1961 below) this is the solution subsequently published in that book and sometimes referred to as Ransom's solution. ********** 1958 .The May 1958 issue of 'Scientific American' included an article by Martin Gardner titled 'About Tetraflexagons and Tetraflexigation' which discusses the Flexatube and gives the solution shown below, which I call the Central Line solution..
In introducing this puzzle Martin Gardner says:
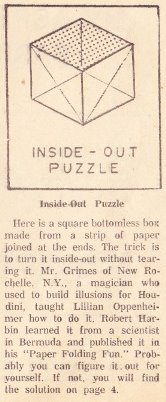
This does not sound to me like a description of the Flexatube but rather of the flexagon I call the Woven Flexatube, which, as the description says, can be flexed into a tube which can then be turned inside out by further flexing. I have published this as the puzzle Night and Day, but it may be that my puzzle is simply a reconstruction of something invented by Arthur Stone. In which case we must presume that Martin Gardner has confused the two designs and that the Flexatube was in fact invented by someone else entirely. A mystery ... Maybe sight of the letter referred to here would clear the mystery up. ********** 1960 The Flexatube appears in 'Paper Folding Fun' by Robert Harbin, which was published by Oldbourne in London in 1960, under the title of 'The Inside Out Puzzle'. The text states 'This ingenious puzzle was shown to the author by a scientist in Bermuda.' The solution given is said to be achievable 'with three folds only'.
********** The Flexatube also features in the revised and enlarged edition of 'Mathematical Snapshots' by Hugo Steinhaus, which was published by Oxford University Press in 1960. This material did not appear in the 1950 edition.
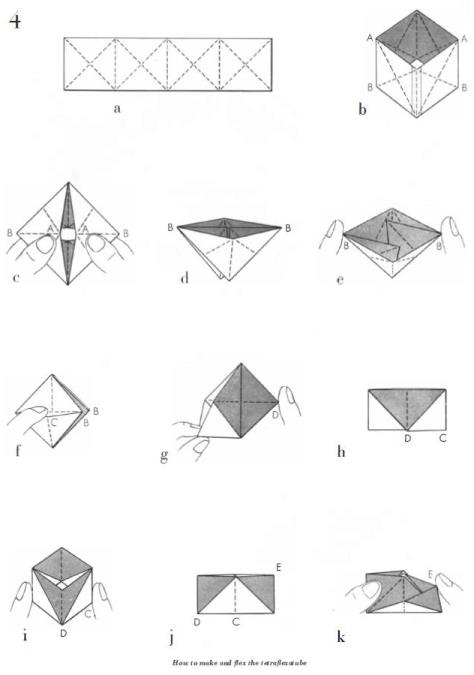
********** 1961 'The Second Scientific American Book of Mathematical Puzzles and Diversions' by Martin Gardner, which was first published by Simon and Schuster in New York in 1961, contains a chapter on Tetraflexagons which includes information on how to make and flex the Tetratube. Martin Gardner calls the Flexatube a flexagon (which it isn't) and states that it was invented by Arthur Stone (who is also credited with inventing flexagons), by implication, in or around 1939. Gardner refers to it as both a 'tetraflexatube' and as the 'flexatube'. Only one solution is given, though at least two others are said to exist. This book has also been published under the title of 'More Mathematical Puzzles and Diversions'. ********** In this same year a short section on Flexagons, which included reference to the Flexatube, was included in the 2nd Edition of 'Mathematical Models' by H M Cundy and A P Rollet, published by Oxford University Press. No solution is given. ********** 1966 The Flexatube also appeared as 'Inside-Out Puzzle' in Vol 6 Issue 3 of the Origamian for Autumn 1966.
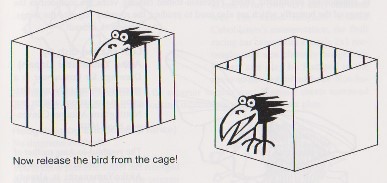
********** The Flexatube has also been published in: 1990 'Mathematical Curiosities 3' by Gerald Jenkins and Anne Wild, published by Tarquin in 1989, contains a net for the Flexatube and gives the Central Line solution. This is a republication of a book originally published in 1981. I have not been able to check if these designs were included in the original 1981 publication. ********** 1998 'The Magic of Flexagons' by David Mitchell, which was published by Tarquin publications in 1998. This book also gives the Central Line solution. ********** 'The President's Challenge' column by Mick Guy in 'British Origami' magazine, issue 192 of October 1998, which gave a treatment in which the object was to release a bird from its cage.
********** 2009 'Paperfolding Puzzles' by David Mitchell, published by Water Trade in 2009, which gives multiple solutions for the puzzle. ********** 2015 'Silverflexagons and the Flexatube' by David Mitchell, published by Water Trade publications in 2015, which gives multiple solutions for the puzzle and also explains and gives solutons for the authors Double and Triple Flexatube Stack puzzles, the Double and Triple Flexatube Chain puzzles and the Flexamat puzzle. ********** |
|||||||